
AI for automatic visual inspection
Development of AI methodologies based on Deep-Learning to extend the implementation of usual approaches to complex industrial applications (little/no data, potentially of poor quality). The work is carried out along two major axes.
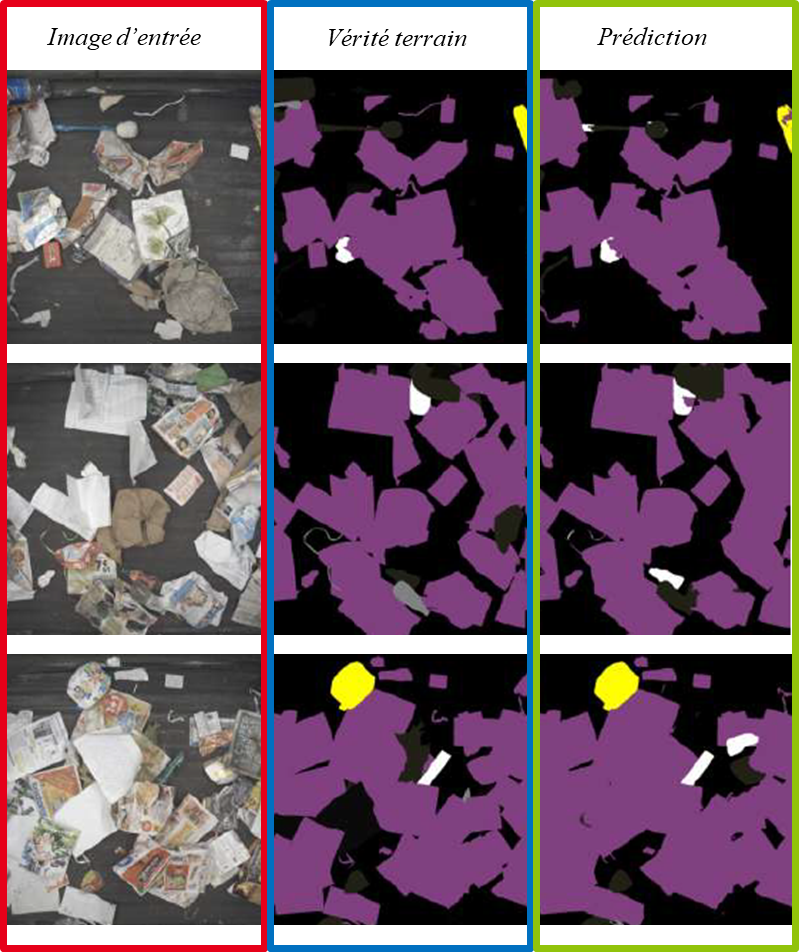
Generation / Exploration of data
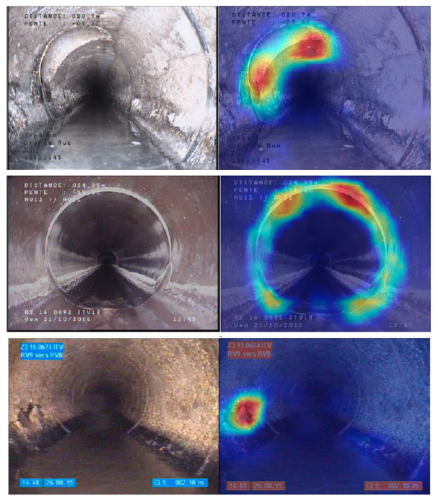
New algorithmic approaches
Vision based localization
Development of vision-based localization tools with the objective of determining the sensor’s 3D pose. For this, several technologies are developed:
In the field of manufacturing, this work is implemented in several applications.

Augmented reality
Development of SLAM algorithms combined with model-based constraints to meet industrial requirements.
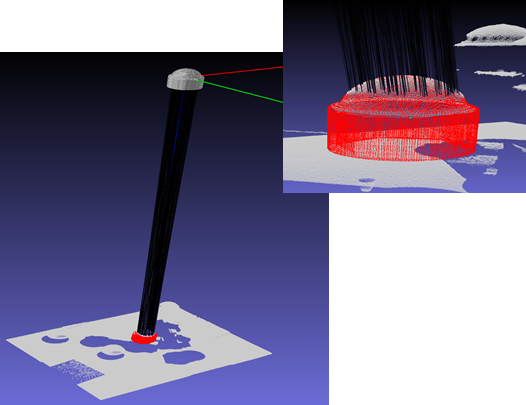
Picking
Development of innovative 3D registration approaches for robotic guidance
Localization
Development of multi-sensor SLAM software for the localization and guidance of operators and/or autonomous robots (AMR, UxVs).
VIDEO IA Manuf – Loc
Natural Language Processing (NLP)
By exploiting NLP technologies, applications allow a natural interaction of the operator with his tool as well as a better understanding of user expectations.
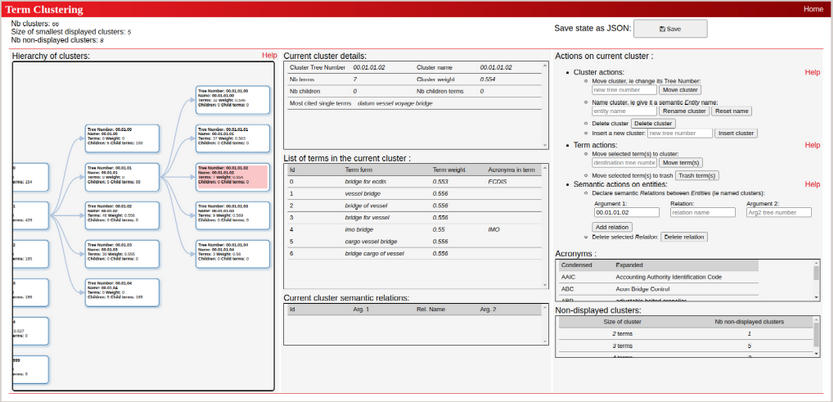
Discovery, Structuration et Knowledge Management (DMS 2.0)
We integrate data-mining tools into Electronic Document Management (EDM) technologies.

Voice dictation for semi-structured reports
NLP tools allow to simplify the report writing process of maintenance reports, by automatically structuring dictated reports for integration into automated processes.