
Our research activities in computer vision were initiated in the 90s to address robot localization and 3D modelling of a site “as built”, specifically for very constrained environments.
Since then, these primary activities were expanded to cover many fields such as geolocalization with and without GPS, precise object localization for augmented reality and robotic prehension, compliance checking, 3D reconstruction and diminished reality. More recently, activities started around photorealistic rendering and image improvement thanks notably to deep Learning approaches and especially generative networks coupled to our vision technologies.
Research topics
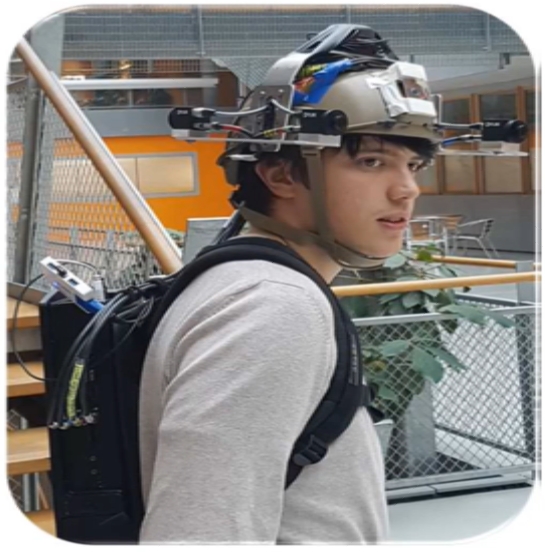
Multi-sensor system prototyping (cameras, IMU, GPS, odometry) and development of algorithms for indoor/outdoor geolocalization (SLAM, MSCKF, place recognition, …) with real time constraints. Systems are designed according to the needs of their carrier : human, drone, robot, vehicle, …
Geolocalization
Localization in unknown environments
Multi-camera system, inertial sensing, GPS + MSCKF algorithm to ensure realtime indoor/outdoor localization in unknown environments without the need for GPS, using SLAM to get a 3D reconstruction of an environment.
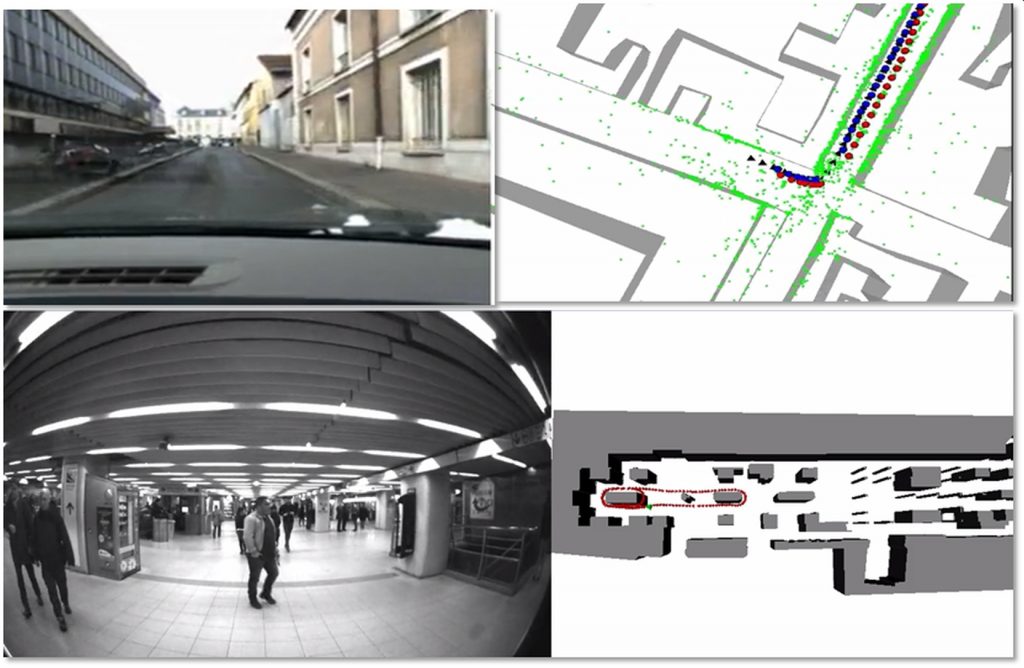
Robust localization in urban environments
3D localization based on vision and sensor fusion algorithms (SLAM coupled with place recognition), requiring a localiztion database to have been constructed first.
LOCALIZATION AND CHARACTERIZATION OF OBJECTS
Development of systems and algorithms for object localization, especially augmented reality and robotic prehension (object grasping and manipulation, bin bicking, depalletization…).
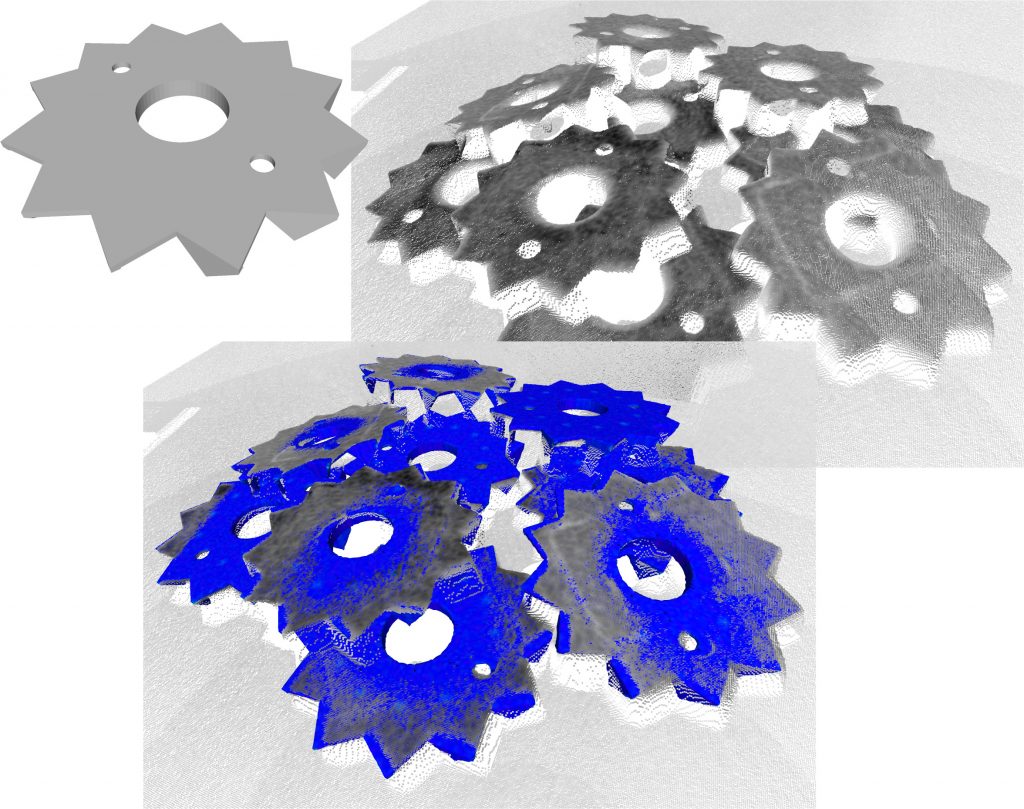
3D object localization in a point cloud
Industrial algorithms for finding instances of a known object in a scene represented as a point cloud.
GPU acceleration of algorithms.
3D vision sensor integration (Tridimeo, Zivid, Photoneo, Ensenso, Kinect, …)
Detection of objects in a homogeneous or heterogeneous bins.
Integration with robotic and prehension.
Technology deployed by : TRIDIMEO
Applications : bin picking
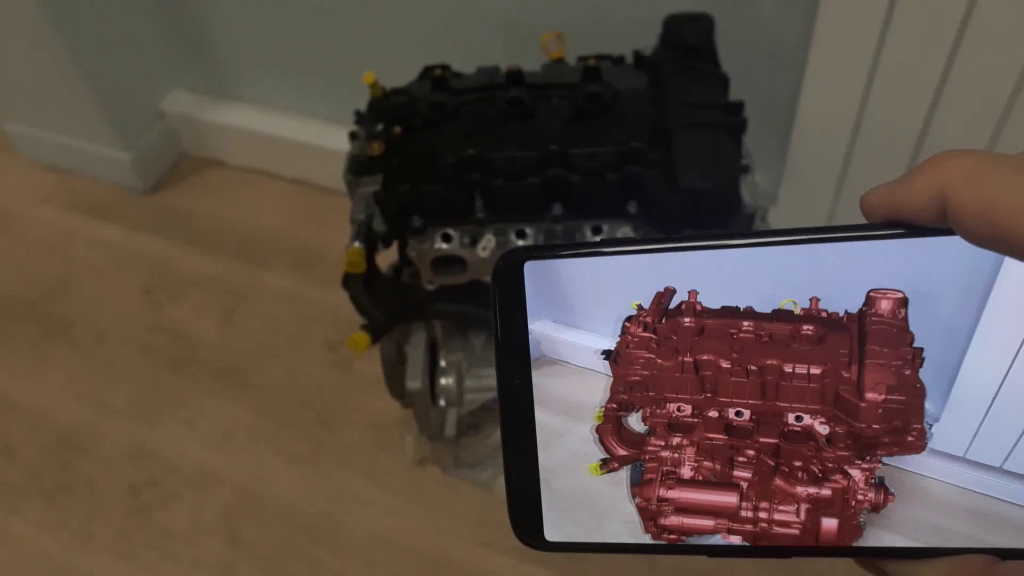
Localization and 3D object tracking from images
Industrial algorithms for localization and tracking of a known or partially known object in an image (object-constrained SLAM).
Developed for mobile platforms.
Technology deployed by : Diota
Applications : augmented reality, industrial assembling

Defect detection
Approaches for comparing point clouds in order to find defects and perform quality checks.
Coupling possible with RGB(-D) and multispectral approaches.
Applications : industiral defect detection and quality check
Multispectral imagery
Defect detection from multispectral images using a TRIDIMEO sensor.
Multispectral imagery for agriculture and forestry.
Applications : industrial control
3D RECONSTRUCTION
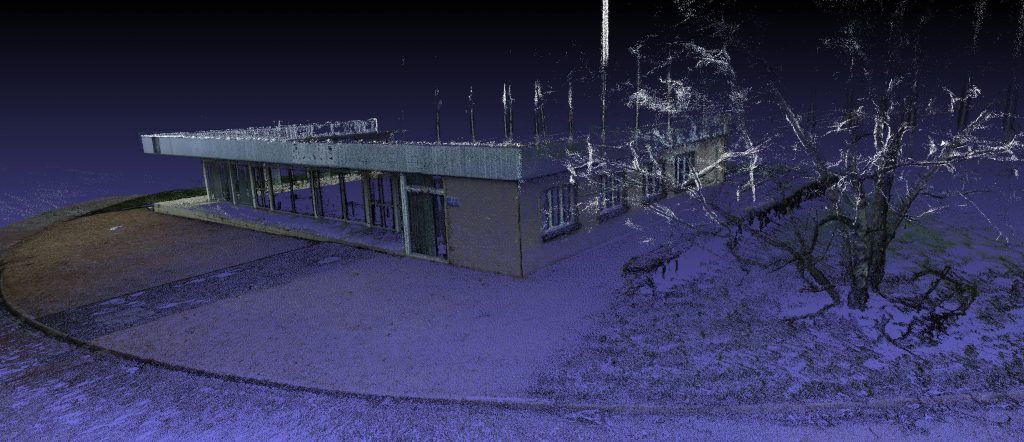
Dense 3D reconstruction
Dense 3D reconstruction from photos or videos, with multiple sensors and panoramic sensing.
100% automatized, without parameters.
Outputs point clouds or textured meshes
GPS integration.
Applications : content generation for VR/AR/decision making, metrology