
Nos activités de recherches en vision par ordinateur ont été initiées dès les années 90 pour adresser des problématiques de localisation de robot et de modélisation 3D d’un site tel que construit dans des environnements très contraints.
Elles se sont depuis élargies et enrichies pour couvrir aujourd’hui des domaines de recherche et d’applications tels que la géolocalisation avec et/ou sans GPS, la localisation précise d’objets notamment pour la réalité augmentée et la préhension robotique, le contrôle de conformité, la reconstruction3D , la réalité diminuée ou encore, plus récemment, le rendu réaliste et l’amélioration d’images, grâce en particulier aux technologies d’apprentissage et en particulier de réseaux génératifs que nous couplons à nos technologies de vision.
Thèmes de recherche
GEOLOCALISATION
Prototypage de systèmes multi-capteurs (caméras, IMU, GPS, odomètre, …) et développement d’algorithmes pour la géolocalisation indoor/outdoor (SLAM, MSCKF, reconnaissance de lieux, …) avec contraintes temps réelles. Les systèmes sont conçus en fonction des porteurs adressés : humain, drone, robot, véhicule, …
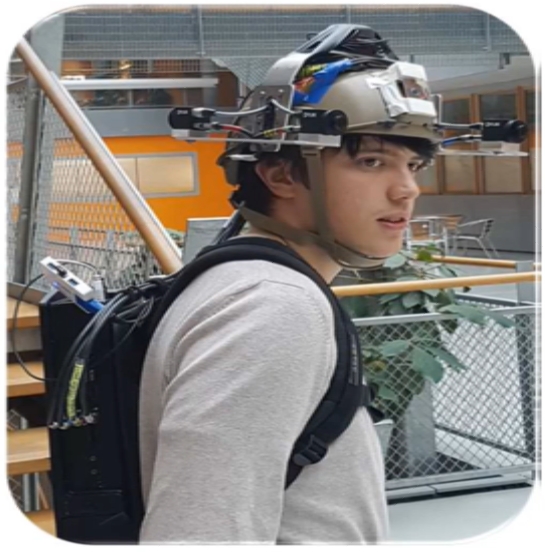
Localisation en environnement inconnu
Système multi-caméras, capteur inertiel et GPS + algorithme MSCKF pour assurer une localisation indoor/outdoor en temps réel en environnement inconnu et sans GPS, couplé à un algorithme SLAM pour la reconstruction 3D de l’environnement.
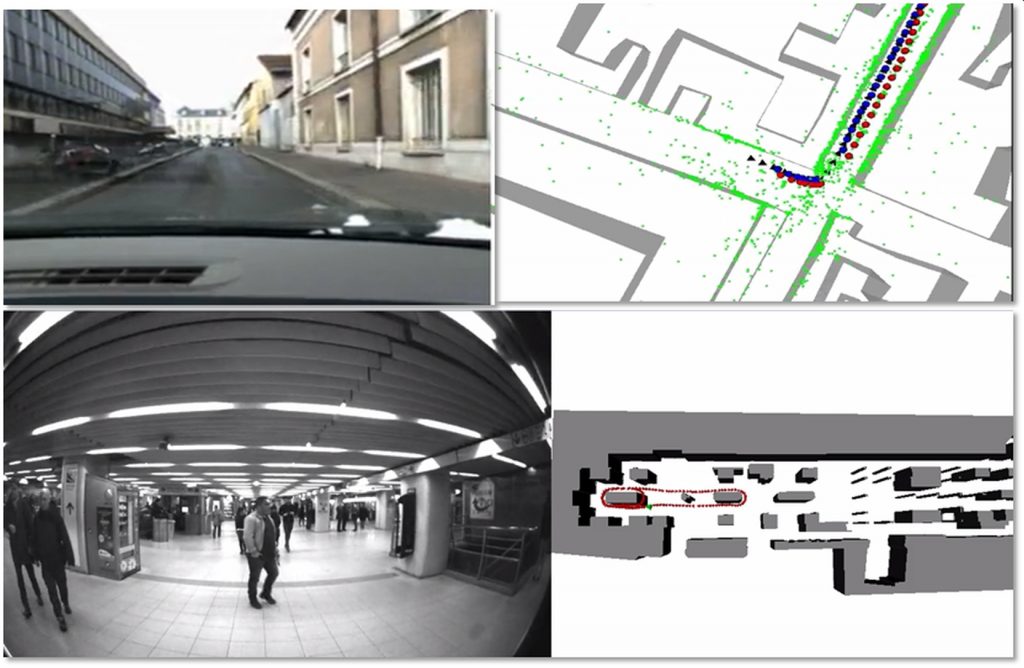
Localisation robuste en environnement urbain
Localisation basée vision et fusion de capteurs reposant sur un algorithme de type SLAM couplé à la reconnaissance de lieux, nécessitant la création d’une base au préalable.
LOCALISATION ET CARACTÉRISATION D’OBJETS
Développement de systèmes et algorithmes dédiés à la localisation d’objets, en particulier pour des application de réalité augmentée et de préhension robotique (saisie et manipulation d’objets, dévracage, dépalettisation…).
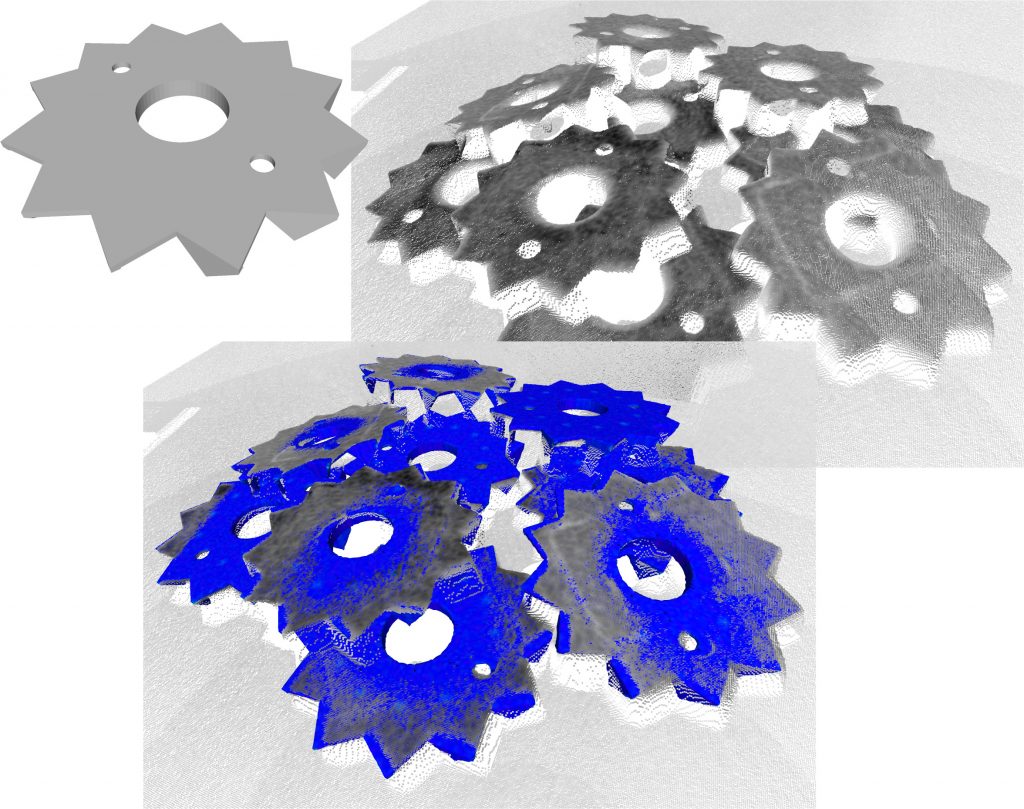
Localisation d’objets 3D dans un nuage de points
Algorithmes industriels de recherche d’un objet de modèle connu dans un nuage de points.
Accélération des codes sur GPU.
Intégration de capteurs de vision 3D (Tridimeo, Zivid, Photoneo, Ensenso, Kinect, …)
Détection de pièces dans un vrac homogène et hétérogène.
Intégration avec robotique et préhension.
Porteur de technologie : TRIDIMEO
Applications : dévracage
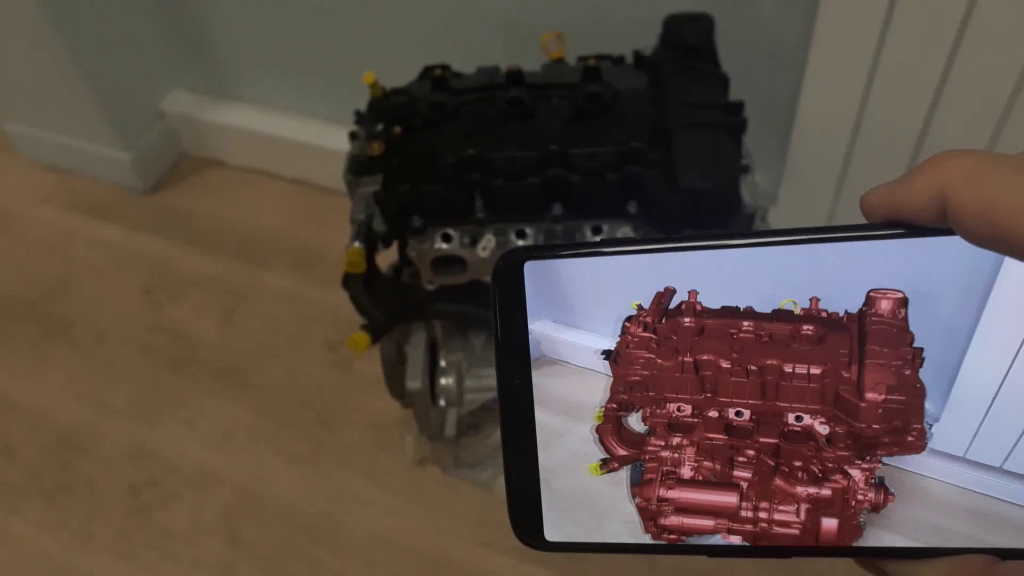
Localisation et suivi d’objet 3D dans une image
Algorithmes industriels de suivi d’un objet de modèle connu ou partiellement connu dans une image (SLAM contraint objet).
Embarqué sur plateformes mobiles.
Porteur de technologie : Diota
Applications : réalité augmentée, assemblage industriel

Contrôle de défauts
Approches de comparaison de nuages de points pour la recherche de défauts de fabrication et le contrôle qualité.
Couplage possible avec des approches basées apprentissage RGB(-D) et multispectral.
Applications : contrôle industriel
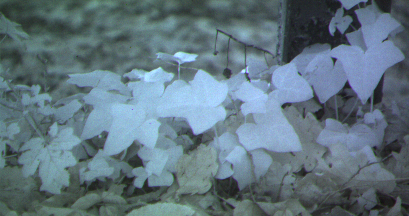
Imagerie multispectrale
Recherche de défauts par imagerie spectrale avec un capteur Tridimeo.
Imagerie multispectrale pour l’agriculture et la sylviculture.
Applications : contrôle industriel
RECONSTRUCTION 3D
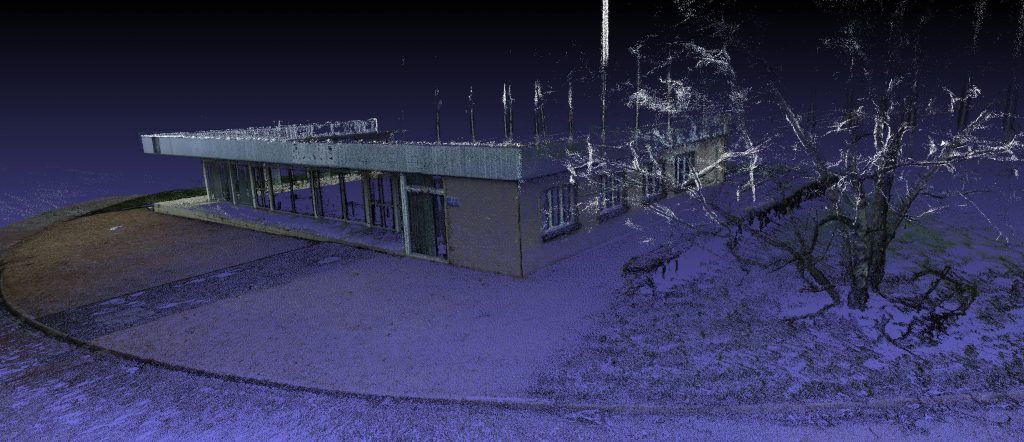
Reconstruction 3D dense
Reconstruction 3D dense
Depuis photos ou vidéos, multi-capteurs / panoramique
100% automatique, sans paramétrage
Fournit nuage de points ou maillage texturé
Intégration GPS
Applications : génération de contenu pour la RV/RA/prise de décision, métrologie
MÉTHODES d’APPRENTISSAGE, DEEP LEARNING
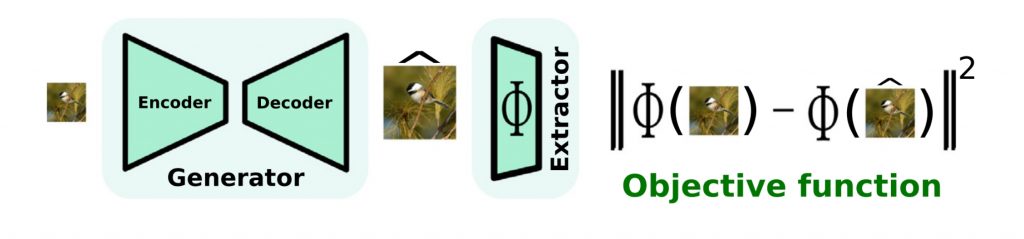
GCN: Generative Collaborative Networks
Nouveau Framework pour la génération de données: généralisation des méthodes existantes pour le problème d’apprentissage d’un mapping entre deux domaines.
Applications : superrésolution, rendu réaliste, amélioration et correction d’images
Compression des réseaux de neurones
Méthode de compression basée sur une approche non-supervisée de réduction de dimension.
Applications : Embarquabilité des réseaux de neurones